clc,close,clear;
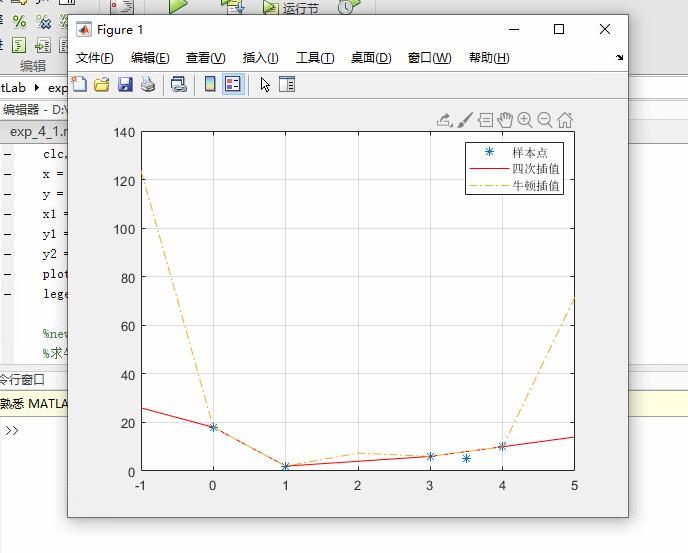
x = [1 3 0 4 3.5];
y = [2 6 18 10 5];
x1 = -1:1:5;
y1 = interp1(x,y,x1,'pchip');
y2 = newton(x,y,x1,1);
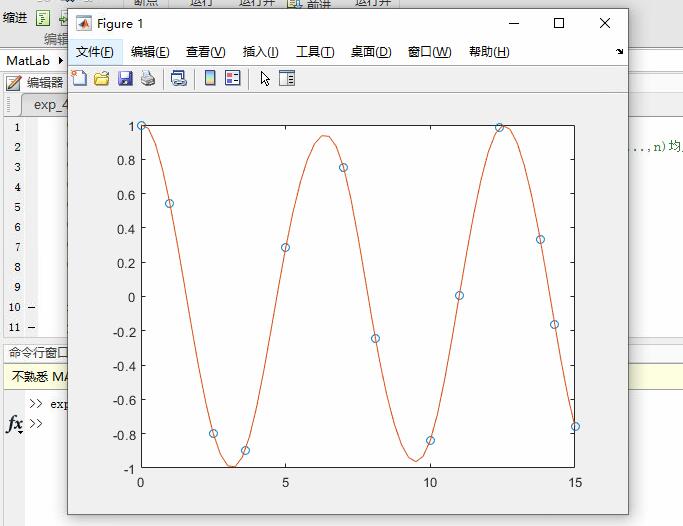
plot(x,y,'*',x1,y1,'r',x1,y2,'-.'),grid,
legend('样本点','四次插值','牛顿插值')
%newton.m
%求牛顿插值多项式、差商、插值及其误差估计的MATLAB主程序
%输入的量:X是n+1个节点(x_i,y_i)(i = 1,2, ... , n+1)横坐标向量,Y是纵坐标向量,
%x是以向量形式输入的m个插值点,M在[a,b]上满足|f~(n+1)(x)|≤M
%注:f~(n+1)(x)表示f(x)的n+1阶导数
%输出的量:向量y是向量x处的插值,误差限R,n次牛顿插值多项式L及其系数向量C,
%差商的矩阵A
function[y,R,A,C,L] = newton(X,Y,x,M)
n = length(X);
m = length(x);
for t = 1 : m
z = x(t);
A = zeros(n,n);
A(:,1) = Y';
s = 0.0; p = 1.0; q1 = 1.0; c1 = 1.0;
for j = 2 : n
for i = j : n
A(i,j) = (A(i,j-1) - A(i-1,j-1))/(X(i)-X(i-j+1));
end
q1 = abs(q1*(z-X(j-1)));
c1 = c1 * j;
end
C = A(n, n); q1 = abs(q1*(z-X(n)));
for k = (n-1):-1:1
C = conv(C, poly(X(k)));
d = length(C);
C(d) = C(d) + A(k,k);%在最后一维,也就是常数项加上新的差商
end
y(t) = polyval(C,z);
R(t) = M * q1 / c1;
end
L = poly2sym(C);
end